SOFTWARE DE EMISIÓN Y GRABACIÓN DE SONIDOS DEL SISTEMA
EL INGENIERO INTENTA CONSTRUIR EL SOFTWARE PARTIENDOME211 – INSTRUMENTATION AND SOFTWARE APPLICATIONS INSTRUCTOR MR
VALIDATION TEST PLAN RUNNING [SOFTWARE PRODUCT] ON VMWARE
1 MANAGEMENTUL PROCESULUI DE TESTARE SOFTWARE 11REZUMAT PROIECTAREA APLICAŢIILOR
1 SOFTWARE DE LA PRÁCTICA ADEMÁS DEL STATGRAPHICS
1 SOFTWARE ENGINEERING LABORATORY SIGNUP SHEET CS 2002
SOFTWARE DE EMISIÓN Y GRABACIÓN DE SONIDOS DEL SISTEMA DE MEDIDAS DE HRTFS CON LABVIEW
|
|
Página: Fecha: 31 de octubre de 2002 |
|
Código: |
Fichero: DETNEAV_44v1.DOC |
-

IAC INSTRUMENTACIÓN
DE/TN-EAV/044v.1 DETNEAV_44v1.DOC
31 de octubre de 2002
PROYECTO / DESTINO:
|
|
|
TÍTULO: |
|
|
|
Nombre |
Función |
|
Mathieu Nedelec |
Becario |
|
|
|
|
|
|
|
|
|
|
Control |
Nombre |
Función |
|
Revisado por: |
Haresh Chulani |
Ingeniero electrónico |
|
Aprobado por: |
|
|
|
Autorizado por: |
|
|
|
Versión |
Fecha |
Resumen Modificación |
|
1 |
31-oct-02 |
Primera Versión |
|
|
|
|
|
|
|
|
Este informe explica el desarrollo del programa de emisión y grabación de sonidos para el proyecto “espacio acústico virtual”. Este programa sirve en el dispositivo de medidas de la HRTF (head related function transfer) que está en el ITC (Santa Cruz). Vamos a ver el dispositivo, las posibilidades de la placa de sonido, el programa y las diferentes opciones que tenemos a nuestra disposición. El objetivo es medir la HRTF, entonces vamos a ver la manera de conseguirla.
CUADRO DE AUTORES 2
CUADRO DE CONTROL 2
historia del documento 2
RESUMEN 3
TABLA DE CONTENIDO 4
Lista de abreviaturas 5
1. INTRODUCCIÓN 6
2. DIPOSITIVO DE PRUEBAS UTILIZADO 7
3. PLACA DE SONIDO 8
4. PROGRAMA PARA EL MODO PUNCH-IN 9
4.1 FRONT PANEL 9
4.2 DIAGRAMA 10
4.2.1 Configuración del sistema de reproducción y de grabación de sonidos. 10
4.2.2 Tratamiento de las datos grabados (retraso, longitud) 11
4.2.3 Registro de los archivos 12
4.3 RESULTADOS 13
5. PROGRAMA EN MODO LOCK TO PLAYBACK 14
5.1 FRONT PANEL 14
5.2 DIAGRAMA 15
5.2.1 Configuración del sistema de reproducción y de grabación de sonidos. 15
5.2.2 Tratamiento de las datos grabados (retraso, longitud) 16
5.2.3 Registro de los archivos 17
5.3 RESULTADOS 18
6. COMPARACION DE LOS DOS MODOS 19
7. MEDIDA DE LA HRTF 20
ANEXOS 21
|
EAV |
Espacio Acústico Virtual |
|
HRTF |
Head Related Function Transfer |
1.INTRODUCCIÓN
Maria de los Angeles Malfaz Vazquez ha desarrollado el software de control de sistema de medidas de HRTFS para el proyecto EAVII. Se desarrolló bajo el entorno Labview 6.0, paquete profesional (Professional Development System).
No tuvo tiempo de realizar el control de la placa PCI de audio (CardDeluxe de Digital Audio Labs). Se puede obtener mas información en www.digitalaudio.com.
Ese documento presenta mi trabajo sobre ese parte del software.
Se debe hacer un Instrumento virtual (función de Labview) que se podrá integrar en el programa de María. El objetivo es emitir un sonido y al mismo tiempo grabar con micrófonos miniatura (situados en las orejas). No se debe tener retraso entre la emisión y la grabación, sino el debido a la distancia entre el altavoz y los micrófonos.
Vamos a ver que la placa de sonido tiene dos modos de grabación (“Punch-In” y “Lock to Playback”). Se ha desarrollado un instrumento virtual para los dos modos.
2.DIPOSITIVO DE PRUEBAS UTILIZADO
El
set-up de laboratorio solo permite trabajar con 1 micrófono
cada vez, y por tanto 1 canal de la CardDeluxe. Para el modo de
operación de 2 canales, se ha probado el programa, pero 1 de
los canales solo adquiere ruido electrónico.
3.PLACA DE SONIDO
Para entrar en la configuración de la placa de sonido CardDeluxe, se debe ir en el panel de control, después en el icono Multimedia, en los dispositivos, dispositivos de audio y en cardDeluxe(configuración).
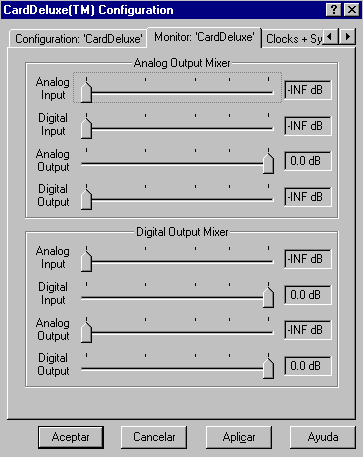
P ara
que el sonido que entra en los micrófonos
ara
que el sonido que entra en los micrófonos
no sale sobre el altavoz, se debe bajar el nivel de “Analog Input” en el “Analog Output Mixer” hasta
“-INF dB”.
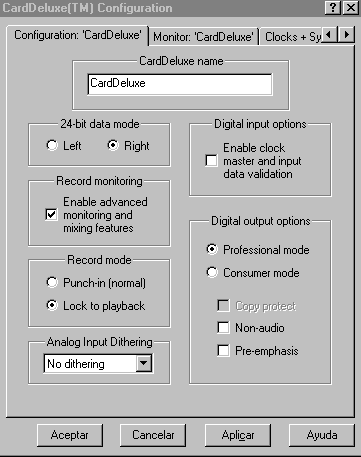
En el primer programa, utilizamos el modo
P unch-in,
es el modo predefinido.
unch-in,
es el modo predefinido.
P ara
sincronizar la grabación y la emisión,
ara
sincronizar la grabación y la emisión,
Se debe elegir el Record mode :
“Lock to playback”, es lo que vamos a utilizar en el segundo programa.
4.PROGRAMA PARA EL MODO PUNCH-IN
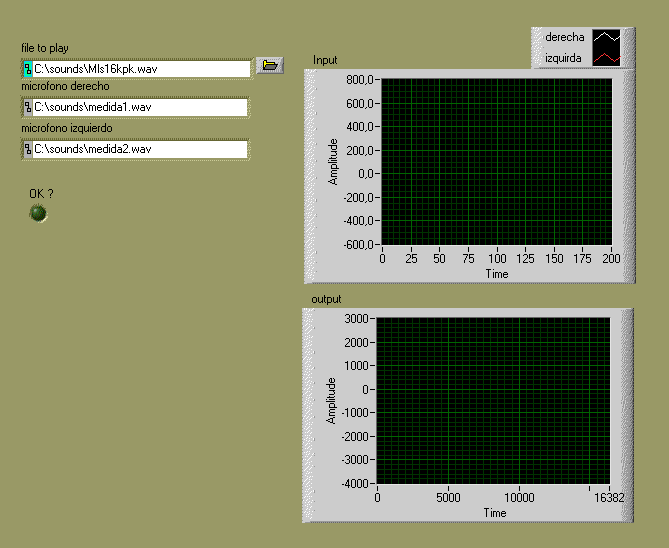
4.1FRONT PANEL
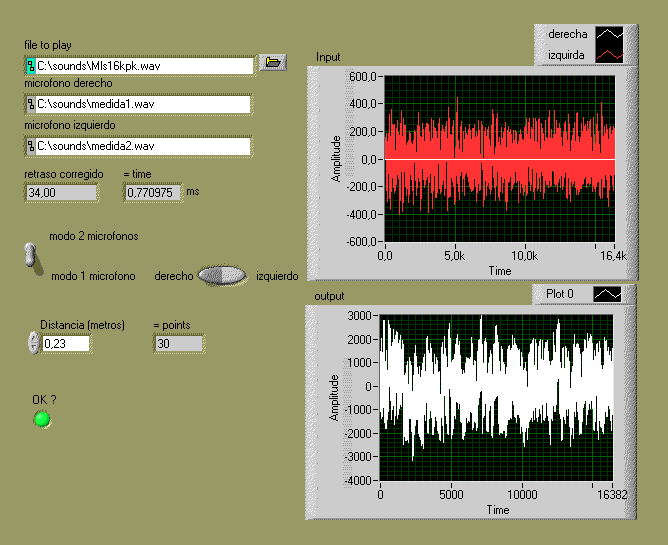
E l
“Instrumento Virtual” que he desarrollado se llama
“play&record.VI”.
l
“Instrumento Virtual” que he desarrollado se llama
“play&record.VI”.
Las entradas:
El fichero que va a salir en el altavoz (1 file path).
Los ficheros donde van a ser grabados las medidas (2 file paths).
La distancia (en metros) entre el altavoz y los micrófonos (1 integer).
El modo de grabación (1 o 2 micrófonos & derecha o izquierda) (2 boolean).
El dispositivo del laboratorio no permitía grabar con los dos micrófonos, entonces hemos creado un modo 1 micrófono. Cuando ese modo esta activo, se debe elegir el derecho o el izquierdo.
Las salidas:
El retraso corregido (en mseg.) (1 integer).
Es el retraso entre la ejecución de los órdenes de grabación y emisión. Este retraso se elimina de la grabación, de manera que el único retraso que permanece es el debido a la distancia física entre el altavoz y micrófonos.
Validación de la grabación, que indica si ésta ha sido correcta (1 boolean).
Indica que los ficheros han sido grabados.
4.2DIAGRAMA
El diagrama se divide en 3 secuencias:
4.2.1Configuración del sistema de reproducción y de grabación de sonidos.
Las funciones de sonidos bajo Labview funcionan en línea.
Sound INPUT:
P![]() rimero
se debe configurar el modo de grabación (Estéreo, Rate
= 44100, 16 bits) y el tamaño del buffer (Si Config). Cogemos
para nuestra aplicación un buffer de 10000 bytes, que son 2500
muestras de 16 bits por canal. Iterando 7 veces dentro de un bucle, y
rellenando el buffer en cada iteración, obtenemos ,397 seg. de
grabación.
Despues, empezamos la grabación (Si Start), y las datos se
guardan en una variable matricia (Si Read). El bucle contiene “shift
registers” ( ) , permite reentrar la salida en la
entrada (a cada nueva bucle). Así, cada vez que el buffer se
llena, hacemos una nueva bucle, y el contenido del nuevo buffer se
agrega al anterior.
rimero
se debe configurar el modo de grabación (Estéreo, Rate
= 44100, 16 bits) y el tamaño del buffer (Si Config). Cogemos
para nuestra aplicación un buffer de 10000 bytes, que son 2500
muestras de 16 bits por canal. Iterando 7 veces dentro de un bucle, y
rellenando el buffer en cada iteración, obtenemos ,397 seg. de
grabación.
Despues, empezamos la grabación (Si Start), y las datos se
guardan en una variable matricia (Si Read). El bucle contiene “shift
registers” ( ) , permite reentrar la salida en la
entrada (a cada nueva bucle). Así, cada vez que el buffer se
llena, hacemos una nueva bucle, y el contenido del nuevo buffer se
agrega al anterior.
Sound OUTPUT:
Recuperamos la forma de onda del archivo “Mls16kpk.wav” (Wav File), y podemos configurar el modo de reproducción (So Config) (Mono, Rate = 44100, 16 bits). La configuración se pasa en una secuencia para que “Si Start” y “So Start” empiecen en el mismo momento. “So wait” permite esperar que todo el archivo sea leido.
“Si Clear” y “So Clear” permiten borrar todos las datos que no sirven.
D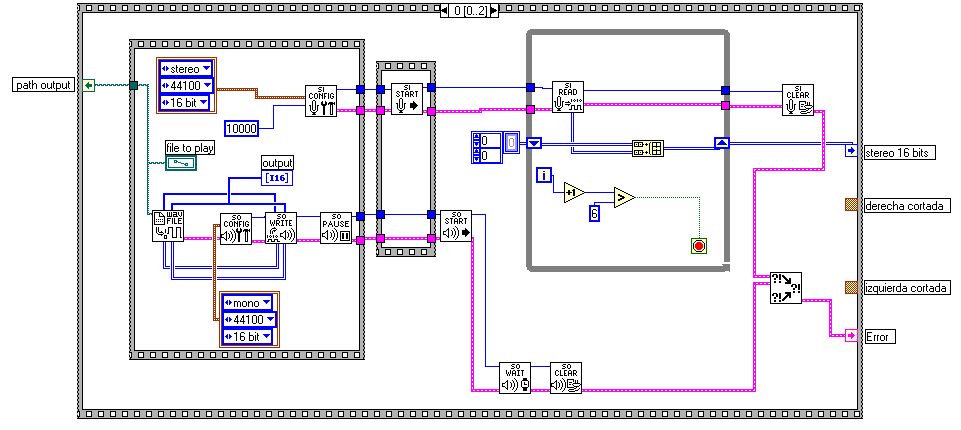
iagrama
0 [0...2]
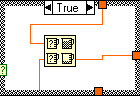
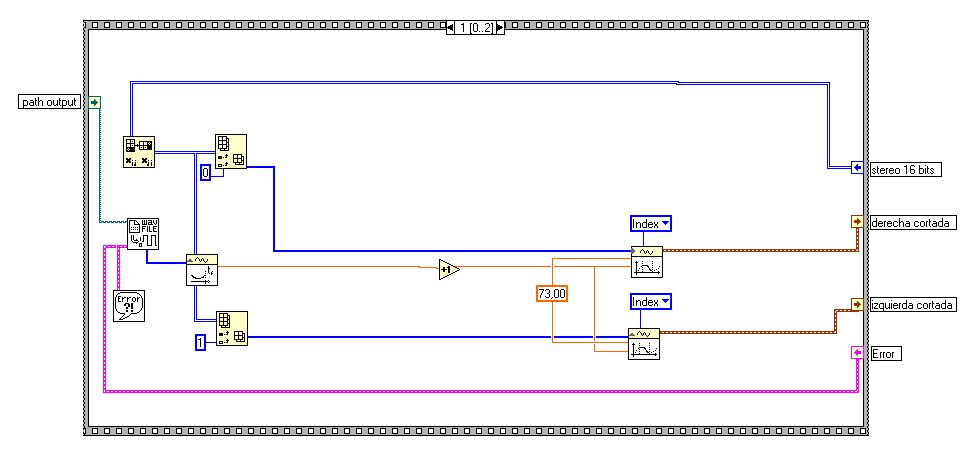
4.2.2Tratamiento de las datos grabados (retraso, longitud)
Primero, se debe separar los dos canales del sonido estéreo. Después, con la función de correlación cruzada, tenemos el retraso de cada canal. Si es en modo 2 micrófonos, cogemos el retraso más pequeño. Se añade el retraso debido a la distancia entre el altavoz y los micrófonos. Se cortan los archivos a la misma longitud que el sonido de salida (0.341 seg.).
Entrada modo 1 / 2 micrófonos: TRUE : 2 micrófonos. (el otro modo no importa)
FALSE : 1 micrófono.
Entrada modo izquierda / derecha: TRUE : izquierda.
(solo en modo 1 micrófono) FALSE : derecha.
Diagrama 1 [0...2]
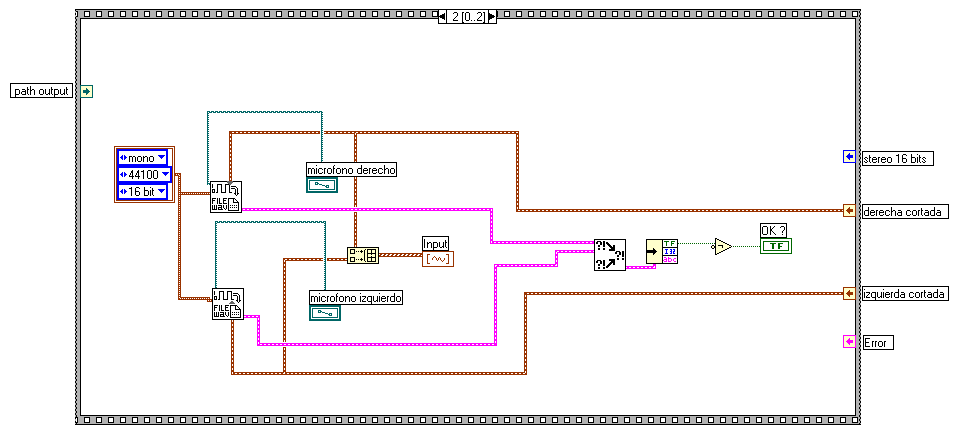
4.2.3R
 egistro
de los archivos
egistro
de los archivos
Se pueden guardar los sonidos en los archivos que se han entrado.
La salida “OK ?” indica que la grabación no ha tenido problema.
OK?: TRUE : todo ha ido bien.
FALSE : hay un problema
Diagrama 2 [0...2]
4.3RESULTADOS
Ese programa funciona pero tiene unos problemas. El retraso debido al software no es siempre el mismo, entonces debemos entrar la distancia entre el altavoz y los micrófonos y después cortar la forma de onda correctamente. El tratamiento de la grabación (correlación cruzada, etc.. ) tiene también un tiempo de ejecución bastante importante. Hay un otro modo en la placa de sonido (“Lock to playback”), quien permite sincronizar la grabación y la reproducción del sonido. Vamos a ver ahora ese nuevo programa.
5.PROGRAMA EN MODO LOCK TO PLAYBACK
5.1FRONT PANEL
El “Instrumento Virtual” que he desarrollado se llama “play&record.VI”.

Las entradas:
El fichero que va a salir en el altavoz (1 file path).
Los ficheros donde van a ser grabados las medidas (2 file paths).
Las salidas:
Validación de la grabación, que indica si ésta ha sido correcta (1 boolean).
Indica que los ficheros están grabados.
5.2DIAGRAMA
El diagrama se divide en 3 secuencias:
5.2.1 Configuración del sistema de reproducción y de grabación de sonidos.
Primero se debe configurar el modo de grabación (Estéreo, Rate = 44100, 16 bits) y el tamaño del buffer (Si Config). Cogemos para nuestra aplicación un buffer de 65830 (0.373 seg. de grabacíon).
Recuperamos la forma de onda del archivo “Mls16kpk.wav” (Wav File), y podemos configurar el modo de reproducción (So Config) (Mono, Rate = 44100, 16 bits).
La placa de sonido tiene un modo “Lock to playback” que permite sincronizar la emisión y la grabación. Se pide primero de reproducir el sonido y cuando se ordena la grabación, la reproducción empieza con un retraso constante de 73 muestras (1,6 ms). Entonces, en ese modo, el sonido no se reproduce si no pedimos despues de grabar.
“So wait” permite esperar que todo el archivo sea leído.
“Si Read” envía los datos grabados en una matriz.
“Si Clear” y “So Clear” permiten borrar todos las datos que no sirven.
D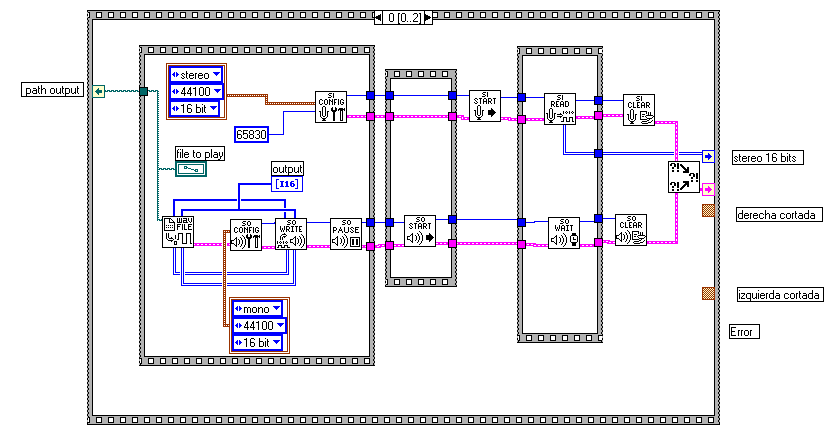 iagrama
0 [0...2]
iagrama
0 [0...2]

Si añadimos una función de espera en ese secuencia (entre el orden de reproducir y el orden de grabar), el retraso no cambia (siempre 73 muestras).
5.2.2Tratamiento de las datos grabados (retraso, longitud)
Primero, se debe separar los dos canales del sonido estéreo.
Tenemos un retraso constante de 73 muestras.
Se puede cortar los archivos a la misma longitud que el sonido de salida (0.341 seg.) y corregir el retraso.
Diagrama 1 [0...2]
5.2.3Registro de los archivos
Se pueden guardar los sonidos en los archivos que se han entrado.
La salida “OK ?” indica que la grabación no ha tenido problema.
OK?: TRUE : todo ha ido bien.
FALSE : hay un problema
Diagrama 2 [0...2]
5.3RESULTADOS
Con ese programa, hemos resuelto el problema del retraso(con el modo “lock to playback”). También, no se necesita entrar la distancia entre el altavoz y los micrófonos, lo que sería una obligación de más en el programa, de recibir las coordenadas y de calcular la distancia.
6.COMPARACION DE LOS DOS MODOS
He probado los dos modos en la sala de medida del Instituto tecnológico de Canarias. Los dos programas dan prácticamente la misma forma de onda. Solo podemos ver una pequeña diferencia de amplitud debida al ruido.
Sobre el tiempo de ejecución, el programa para el modo “lock to playback” esta mas rápido. En efecto, el programa para el modo “punch in” hace correlaciones cruzadas y otras operaciones. El segundo problema es la necesidad de entrar la distancia entre el altavoz y los micrófonos mientras que en el modo “lock to playback”, tenemos un retraso constante que podemos corregir fácilmente.
Por eso, el programa “lock to playback” esta el mas adaptado a nuestra aplicación. Solo falta integrar lo en el programa de María.
Podemos ver que los dos programas en misma condición dan al misma función de transferencia. Se puede ver como tener la en la pagina siguiente.
 PUNCH-IN
: LOCK TO PLAYBACK :
PUNCH-IN
: LOCK TO PLAYBACK :
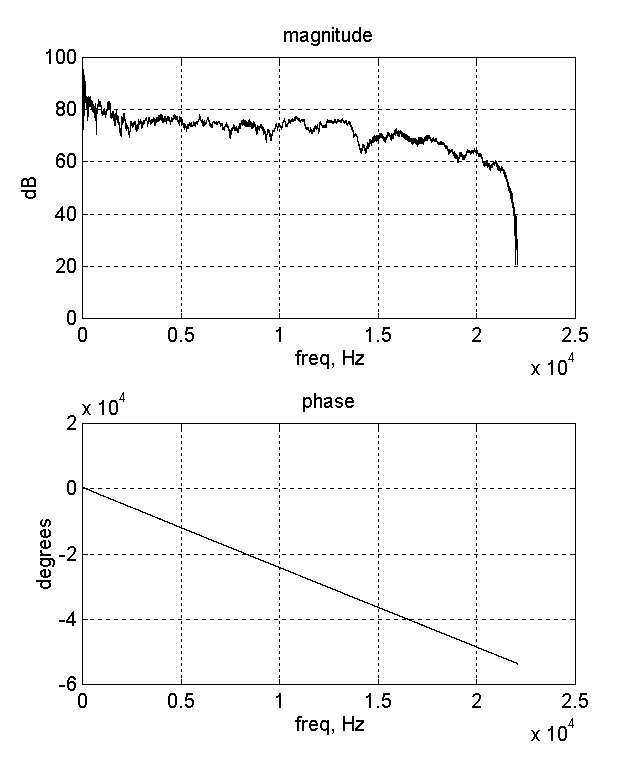
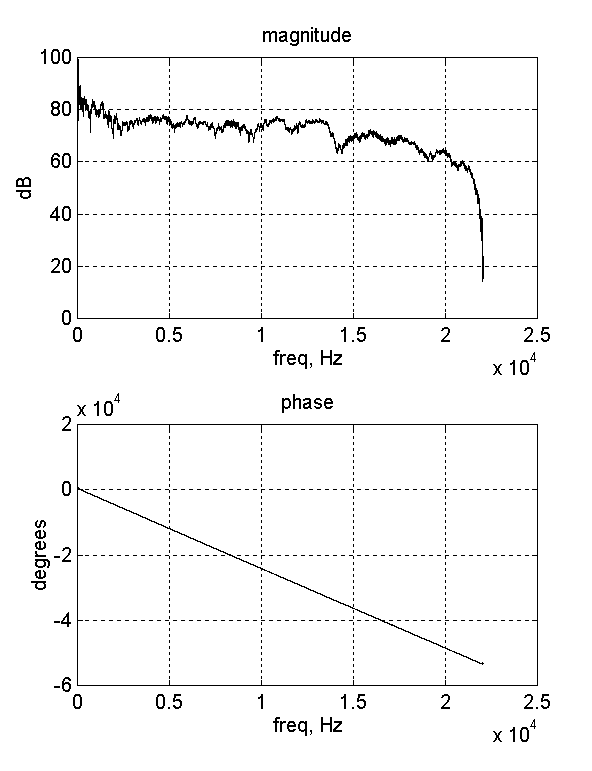
7.MEDIDA DE LA HRTF
Con el archivo grabado, se puede calcular la función de transferencia del sistema.
Utilizamos para nuestras medidas el fichero mls16kpk.wav, ese fichero corresponde al fichero mlbs.wav filtrado.
R(t) h(t) = mlbs y(t)
La procedimiento para obtener la funcion de transferencia bajo MatLab es el siguiente :
El fichero grabado se llama medida.wav por ejemplo
>> [mls,n] = readsim(‘C:huron\measure\mls0116k.sim) recuperamos la forma de onda de mls0116k.sim
>> wav2raw(medida.wav) transformamos en .raw medida.wav
>> medida = readraw2(‘medida.raw’,1,16,1) recuperamos la forma de onda de medida.raw
> 2^14-1
>> plotmag(h,44100) podemos representar
>>shg la función de transferenci
|
DETNEAV_044V1.doc |
El informe |
|
PLAY&RECORD1.vi |
Programa en modo “punch-in” |
|
PLAY&RECORD2.vi |
Programa en modo “lock to playback” |
|
Mls16kpk.wav |
Fichero utilizado para hacer las medidas |
11 COMPUTATIONAL STATISTICAL INFERENCE R SOFTWARE POSSIBILITIES
2 ESTIMACIÓN DE ESFUERZO EN DESARROLLO DE SOFTWARE 4
2 POCKETPC (HANDHELD) CON GPS Y 2 LICENCIAS SOFTWARE
Tags: emisión y, la emisión, software, sonidos, emisión, grabación, sistema
- CONVENIO DE PARTICIPACION EN EL PROGRAMA RYE QUE CELEBRAN
- ON LATTICE CHARACTERIZATION OF LP(LQ) SPACES AND THEIR SUBLLATICES
- DIRECCIÓ DE SERVEIS A LES PERSONES I AL TERRITORI
- DESTRUCTION OF SELECT AGENTS PROCEDURES I GENERAL SAFETY
- JOB DESCRIPTION & PERSON SPECIFICATION JOB DESCRIPTION JOB TITLE
- XIEGU RADIO DATA COMMUNICATION CONNECTION SETUP TUTORIAL IN
- REGISTAR PRAVNIH LICA PRIVREDNA DRUŠTVA GRAD VISOKO 1
- LIETUVOS RESPUBLIKOS SOCIALINĖS APSAUGOS IR DARBO MINISTRO 2015 M
- INFRAESTRUCTURAS Y MEDIO AMBIENTE LICITA LAS OBRAS DE URBANIZACIÓN
- ENFOQUES DE LAS CIENCIAS EXPERIMENTALES PARA LA CONSERVACIÓN MARIÁN
- LAND WATER AND PEOPLE EARLY USES OF TREES BY
- TOWARDS A “SECURITY INDEX” FOR ICCAS A VERY
- TÄVLINGSSEKTIONEN AGENDA OCH PROTOKOLL – 190318 NÄRVARANDE FRÅNVARANDE
- EK1 MALI DESTEKLERE İLIŞKIN TEMEL ESASLAR DESTEK ADI DESTEK
- ARTE Y VERDAD DE LA PALABRA HANSGEORG GADAMER
- EJERCICIOS SOBRE MY NCBI DE PUBMED 1
- PRAVILNIK O USLOVIMA DRŽANJA NAČINU OBELEŽAVANJA I EVIDENTIRANJA DIVLJIH
- REAL DECRETOLEY 82008 DE 24 DE OCTUBRE POR EL
- AUSTRIA LATINA CREMIFANENSIA SE AUSTRIA LATINA KREMSMÜNSTER (1617
- CATALÀ NOTA DE PREMSA ARTCAVA NOVEMBRE 2008 ARTCAVA
- HTTPACCESSORIESSKYPECOMSECTION?SID4332A4AAA3C66C0D0DE0CF18A2A21A7BCB74575&SECID38893 HTTPDUALPHONENET HTTPDUALPHONENETFILESBILLEDER3058883088RTX091024X576ENGZIP DUAL SKYPETELEFON – KEIN PC
- I F S IMMUNIZATION DIRECTIVE NUMBER TOPIC
- PROJEKTNI ZADATAK ENERGETSKA OBNOVA OPĆE ŽUPANIJSKE BOLNICE POŽEGA
- CASOS REALES DE FRAUDE INFORMÁTICO Y LEGISLACIÓN EN BOLIVIA
- 1PIELIKUMS IEPIRKUMS „VĒRTĒŠANAS PAKALPOJUMU SNIEGŠANA” IDENTIFIKĀCIJAS NR 114EKO201510 FINANŠU
- REGLAMENTO DEL COMITÉ DE ÉTICA DE LA INVESTIGACIÓN
- 93 GEODETSKOTOPOGRAFSKKARTOGRAFSKA BAZA G E O D E T
- ALLGEMEINE INFORMATIONEN ZU DEN FRANZÖSISCHKURSEN WINTERSEMESTER 2122 BEGINN DER
- ZAŁĄCZNIK NR 1 DO ZARZĄDZENIA NR 4016 REKTORA AWF
- ANALISIS SITUACIONAL DE INFORMÁTICA UNIDAD EJECUTORA CÓDIGO NOMBRE
 21082019 CENICEROS HA EFECTUADO LA ENTREGA TESTIMONIAL DE LA
21082019 CENICEROS HA EFECTUADO LA ENTREGA TESTIMONIAL DE LA 21012021 VALORACIÓ D’UGT COVID 19 I CENTRES D’INFÀNCIA AVUI
21012021 VALORACIÓ D’UGT COVID 19 I CENTRES D’INFÀNCIA AVUI D JEČJI VRTIĆ KAPLJICA POTOČNA 4 POLJANICA BISTRANSKA 10
D JEČJI VRTIĆ KAPLJICA POTOČNA 4 POLJANICA BISTRANSKA 10REFERAT FRA ÅRSMØTET I TROMSØ HUNDEKLUBB 7 APRIL
 PARTNER HUB IN BUCHAREST OMNILOGIC SRL 36
PARTNER HUB IN BUCHAREST OMNILOGIC SRL 36 JOB DESCRIPTION DIRECTORATE CHIEF EXECUTIVE’S DEPARTMENT TRANSFORMATION AND CUSTOMER
JOB DESCRIPTION DIRECTORATE CHIEF EXECUTIVE’S DEPARTMENT TRANSFORMATION AND CUSTOMER QUICK REFERENCE STYLE GUIDE—MAY 2011 THIS QUICK REFERENCE STYLE
QUICK REFERENCE STYLE GUIDE—MAY 2011 THIS QUICK REFERENCE STYLE T E1508 RANSLATION OF DOCUMENT MINIMUM ENVIRONMENTAL &
T E1508 RANSLATION OF DOCUMENT MINIMUM ENVIRONMENTAL &SUSANA ESPINOSA SUSIFESPINOSAGMAILLCOM SUSANAESPINOSAUNLAEDUAR WWWSUSANAESPINOSACOM ARGENTINA NACIÓ
REGULAMIN WYDAWANIA MATERIAŁÓW PROMOCYJNYCH POZOSTAJĄCYCH W DYSPOZYCJI WYDZIAŁU PROMOCJI
DIGITAL DATABASE DESCRIPTION FOR USGS OF 00376 INTRODUCTION THIS
RECORDAMOS LA ORGANIZACIÓN DE LA TAREA DE FRANCÉS 1º
WNIOSEK O PRZYZNANIE STYPENDIUM MINISTRA WŁAŚCIWEGO DO SPRAW ZDROWIA
MINISTERIO DE GOBIERNO DE BOLIVIA RESOLUCION MINISTERIAL N° 3458
 SOLICITUD DE SUBVENCIÓN PARA ESTANCIAS DE MOVILIDAD EN EL
SOLICITUD DE SUBVENCIÓN PARA ESTANCIAS DE MOVILIDAD EN ELTESTS COPIE Y COMPLETE EN UN LUGAR TRANQUILO Y
 EFIFTH LACCEI INTERNATIONAL LATIN AMERICAN AND CARIBBEAN CONFERENCE FOR
EFIFTH LACCEI INTERNATIONAL LATIN AMERICAN AND CARIBBEAN CONFERENCE FOR X PROGRAMA DE FORMACIÓN DEPORTIVA NUTRICIÓN Y DIETÉTICA
X PROGRAMA DE FORMACIÓN DEPORTIVA NUTRICIÓN Y DIETÉTICANEVLADINA ORGANIZACIJAUDRUŽENJE GRAĐANA ADRESAWEB ADRESATELEFON FAX EMAIL IZVJEŠTAJ O
 Ş UBAT AYI MECLİS TOPLANTILARI 1 BİRLEŞİM 1 OTURUMUNA
Ş UBAT AYI MECLİS TOPLANTILARI 1 BİRLEŞİM 1 OTURUMUNA
