TEMAT REAKCJE PODPÓR I PODSTAWY TEORETYCZNE TWIERDZENIA O ROZKŁADZIE
KIS SÁNDOR MATEMATIKAVERSENY 201819 TANÉV SZAKKÖZÉPISKOLA III FORDULÓNAZIV PROJEKTA BOD TEMATSKA GRUPA VRSTA INTERVENCIJE (OBLAST
SISTEMATIZACIÓN DE LA EXPERIENCIA DE ELABORACIÓN DE LA
VABILO NA TEMATSKO USPOSABLJANJE ZA PROSTOVOLJCE KOMUNIKACIJA Z
WIADOMOŚĆ ORYGINALNA TEMAT FW WNIOSEK O UDOSTĘPNIENIE
(1) TITLE SYSTEMATIC REVIEW OF THE SAFETY AND EFFICACY
Projekt I
Temat: Reakcje podpór
Podstawy teoretyczne
Twierdzenia o rozkładzie prędkości bryły sztywnej.
Rzuty prędkości punktów bryły sztywnej na prostą (l) łączącą te punkty są sobie równe.
Końce
wektorów prędkości punktów ciała
sztywnego leżących na prostej (l) tworzą
prostą (najczęściej to twierdzenie wykorzystujemy w
przypadku gdy
![]() ).
).
Stopień swobody
Każdy niezależny parametr potrzebny do opisu ruchu danego układu. Ruch swobodny płaski (tarcza w ruchu na płaszczyźnie): lss=3.
Liczbą stopni swobody układu materialnego (tarcza sztywna, belka) nazywamy liczbę niezależnych parametrów, które należy określić, aby znać położenie każdego punktu tego układu w przestrzeni (na płaszczyźnie).
ruch płaski obrotowy (z 1 punktem uruchomienia) - 1 stopień swobody
ruch postępowy ma zadany kierunek ruchu - 1 stopień swobody
ciało nie może się obracać
1 punkt ma 2 stopnie swobody (współrzędne)
dowolny ruch ciała sztywnegomna płaszczyźnie - 3 stopnie swobody
ruch kulisty w przestrzeni - 3 stopni swobody
ruch dowolny w przestrzeni - 6 stopni swobody
Równowaga ciała => ciało jest nieruchome, nie zmienia położenia, spoczywa.
=> ciało sztywne jest równowadze, gdy każdy punkt tego ciała w każdej chwili trwania ruchu posiada zerowe prędkości wszystkich punktów: v=0
WARUNKI KONIECZNE I WYSTARCZAJĄCE RÓWNOWAGI CIAŁA
należy stwierdzić, że: w chwili t0 = 0, wektor VA = 0 dla każdego A należącego do V(?)
warunek konieczny: układ sił działających na ciało musi być równoważny układowi zerowemu
{U} = {0} wektor sumy = 0 i zarazem wektor M0 = 0
Jest to warunek konieczny i wystarczający równowagi układu sił
Układ sił działających na ciało swobodne (jest to układ wektorów zaczepionych) jest równoważny układowi zerowemu (tzn. jest w równowadze) jeżeli suma wszystkich sił tego układu jest wektorem zerowym oraz moment wszystkich sił tego układu względem dowolnie wybranego punktu jest wektorem zerowym.
TW. Jeżeli układ posiada wektor s=0 oraz wektor M0 = 0 to wektor momentu względem dowolnego punktu (O1, O2,...) jest zerowy: M01=M02=0
Równowaga sił – układ sił jest w równowadze, jeżeli przyłożony do ciała swobodnego nie zmienia jego położenia; taki układ sił jest równoważny układowi zerowemu.
Więzy - wszelkiego rodzaju ograniczenia nałożone na ruch ciała.
- to połączenia nieodkształcalne (sztywne) ciała sztywnego z układem odniesienia
Więzy są:
- gładkie (reakcja więzów nie wykonuje pracy w trakcie ruchu, np. ruch bez tarcia);
- stacjonarne (niezmienne w czasie);
- dwustronne (f(…)=0, tzn. można je zapisać w postaci równań);
- geometryczne (ograniczają położenie punktów ciała).
Rodzaje:
- podparcie przegubowo nieprzesuwne = przegub => unieruchomienie ciała w jednym punkcie względem układu odniesienia, zabiera 2 stopnie swobody
- podparcie przegubowo przesuwne => podpora zabierająca danemu punktowi 1 stopień swobody
Postulat o więzach.
Działania więzów można zastąpić odpowiednimi siłami, takimi, aby w ruchu ciała nic się nie zmieniło (zamiana więzów na odpowiednie siły nie wpływa na ruch ciała).
W ruchu konstrukcji (w równowadze, która jest szczególnym rodzajem ruchu) nic się nie zmieni, gdy więzy przyłożone do tej konstrukcji zastąpimy odpowiednimi (odpowiednio wyznaczonymi, obliczonymi) siłami zwanymi reakcjami (siłami biernymi).
Jeśli ciało poddane jest działaniu więzów, to zgodnie z postulatem o więzach zastępujemy je odpowiednimi siłami.
Ciało będzie swobodne, jeżeli wszystkie więzy zastąpimy siłami biernymi, czyli reakcjami.
Warunkiem koniecznym równowagi ciała (czyli warunkiem koniecznym i wystarczającym równowagi układu sił działających na to ciało) jest aby: układ sił czynnych i biernych był równoważny układowi zerowemu, tzn. aby wektor sumy = 0 oraz wektor M0 = 0.
Są to równania na wektory, które dają 6 równań skalarnych w przestrzeni, a dla układu płaskiego 3 równania skalarne (2 współczynniki sumy i 1 momentu)
Równań skalarnych równowagi układów sił jest tyle, ile ciało posiada stopni swobody.
∑ X=0 ∑ MA=0 ∑ MA=0
∑ Y=0 ∑ MB=0 ∑ MB=0
∑ MO=0 ∑
SAB=0 ∑
MC=0ꗬÁ‥Е
橢橢
Proszę ten wzór zapisać inaczej, bo na moim komputerze nic nie widzę.
Aż do tego miejsca widzę tylko „prostokąty”
podpór można wyznaczyć z równań równowagi. Warunkami koniecznymi równowagi ciała są równania równowagi układu sił czynnych i biernych działających na ciało. Czyli są to warunki konieczne i wystarczające równowagi układu sił – warunki, które zapewniają nas, że układ sił jest równoważny układowi zerowemu. Aby mieć warunek wystarczający równowagi ciała, potrzebny jest jeszcze warunek początkowy, którym jest informacja, że więzy przyłożone do ciała odbierają mu wszystkie stopnie swobody (lss=0). Równań równowagi
Tu też czegoś nie widzę..................................................
swobody układu materialnego (tarcza sztywna, belka) nazywamy liczbę niezależnych parametrów, które należy określić, aby znać położenie każdego punktu tego układu w przestrzeni (na płaszczyźnie).
ruch płaski obrotowy (z 1 punktem uruchomienia) - 1 stopień swobody
ruch postępowy ma zadany kieropieie mnkt ma 2 stopnie swobody (współrzędne)
dowolny ruch ciała sztywnegomna płaszczyźnie - 3 stopnie swobody
ruch kulisty w przesntu posiada kierunek prostopadły do płaszczyzny zawierającej siły, dlatego wyznaczanie trzeciej współrzędnej może odbyć się metodą „siła razy ramię” (ramię jest to odległość punktu od prostej wyznaczającej kierunek siły). W pozostałych przypadkach moment siły liczymy zgodnie z definicją iloczynu wektorowego.
Wszystkie obliczenia należy wykonywać z dokładnością do czterech cyfr znaczących.
Algorytm postępowania.
Warto myśleć aby się nie napracować! Każde równanie równowagi powinno zawierać – o ile jest to możliwe - tylko jedną reakcję (niewiadomą). Do wyznaczenie reakcji podpór dobieramy ten układ równań, który spełnia to kryterium. Staramy się dlatego tak budować równania, aby wyznaczane poszczególne reakcje nie zależały one od innych – nawet, jeżeli zostały wyliczone we wcześniejszym kroku (należy w maksymalnym stopniu wyeliminować możliwość popełnienia błędów rachunkowych i ich wpływ na dalsze obliczenia). Po wyznaczeniu wszystkich reakcji (koniecznie) dokonujemy sprawdzenia.
W algorytmie dla konkretnego zadania wybieramy taki układ równań (przed przystąpieniem do konkretnego rozpisywania tych równań, niezależnie od sposobu obciążenia konstrukcji), aby spełnić powyższe wymagania i aby mieć pewność, że ten układ jest najprostszym, dającym się najłatwiej rozwiązać.
Przykład liczbowy.
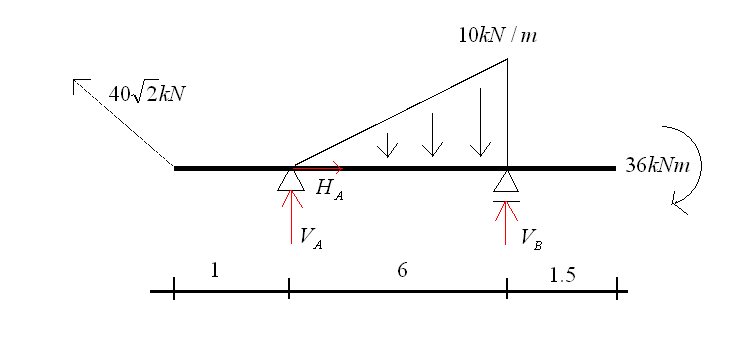
Do wyznaczenia reakcji podpór w powyższym przykładzie wykorzystamy równania:
![]()
Jest to najprostszy ze wszystkich możliwych układów równań: z każdego równania, które zawiera tylko jedną reakcję, obliczymy jej wartość niezależnie od wyników – poprawnych czy z błędami – innych reakcji.
Ad. 1)
![]()
Ad. 2)

Ad. 3)
Sprawdzenie:
![]() ?
?
![]()
03022021 R TEMAT LICZBY DOSKONAŁE PRZYKŁAD LICZBA 496 JEST
0502 BIOLOGIA KL7A TEMAT POWTÓRZENIE WIADOMOŚCI UKŁAD WYDALNICZY CEL
1 PRIEDAS FILOLOGIJOS MOKSLO (04H) KRYPTIES DISERTACIJŲ TEMATIKOS IR
Tags: podpór i., reakcji podpór, temat, twierdzenia, rozkładzie, podpór, teoretyczne, reakcje, podstawy
- CHECKLISTE FÜR DAS VORSTELLUNGSGESPRÄCH ERARBEITET VON PETER LUTZ (INITIANT
- WAYS OF RUSSIAN THEOLOGY FR GEORGE FLOROVSKY
- 5 BELA – BELA LOCAL MUNICIPALITY TARIFFS BYLAW 20182019
- MARTINSKÁ TEPLÁRENSKÁ AS ROBOTNÍCKA 17 036 80 MARTIN TELEFÓNNE
- DRAFT SCIENCE COURSE LEVEL EXPECTATIONS A FRAMEWORK FOR INSTRUCTION
- PAŃSTWOWY POWIATOWY INSPEKTOR SANITARNY W ŁAŃCUCIE 37100 ŁAŃCUT UL
- DOHODA MEZI EVROPSKÝM SPOLEČENSTVÍM A ALBÁNSKOU REPUBLIKOU O USNADNĚNÍ
- PERATURAN PERUSAHAAN ( PP ) CVXYZ PERIODE 2016
- W ETENSCHAP VOOR PATIËNTEN (SCIENCE TO PATIENTS) IT IS
- CARPE PHASE IIB NGO CONSORTIA LANDSCAPE 1 MONTE
- HOGYAN KÉSZÜL A NOTIFIKÁCIÓ MIT KELL TUDNI AZ EDP
- CHECKLISTE ANTRAGSUNTERLAGEN ART DER UNTERLAGE1 ANMERKUNGEN AMTL FORMULAR VORDRUCK
- V V DAVYDOV PROBLEMAS DO ENSINO DESENVOLVIMENTAL A EXPERIÊNCIA
- C) THE SEIGNEURY SYSTEM [TEXT PP 240242] IN
- ZAŁĄCZNIK NR 1 MICHALE (DATA) DYREKTOR SZKOŁY PODSTAWOWEJ
- EN EXCEL EXISTEN MENSAJE DE ERROR CUANDO SE INGRESA
- İÇİNDEKİLER I ALÇAK GERİLİM TESİSATI ÖZEL TEKNİK ŞARTNAMESİ 1
- DÍA DE LA CONSTITUCIÓN 6 DE DICIEMBRE DE 2020
- ПРИЛОЖЕНИЕ 26 К ПОЛОЖЕНИЮ О РАСКРЫТИИ ИНФОРМАЦИИ ЭМИТЕНТАМИ ЭМИССИОННЫХ
- 20 S UNTUK KEGUNAAN PEMERIKSA ULIT BAHAGIAN A JAWAB
- NB IN ORDER TO VIEW THIS DOCUMENT YOU MAY
- DESCRIPCIÓN DEL FUEGO DEL INFIERNO ] ESPAÑOL [ وصف
- DĄBROWA BIAŁOSTOCKA DNIA 22012018R WYKONAWCY SP ZOZ 22
- B OSBEEKSCHOOL BURGEMEESTER ENSCHEDELAAN 66 2071 AW SANTPOORTN AANVRAAGFORMULIER
- Nacrt Plana Praćenja Provedbe Natječaja za Udruge i ocd
- LIBRARY LESSON OBJECTIVES STUDENTS WILL BE ABLE TO A)
- SUBSECRETARÍA REGIONAL DEMARCACIÓN HIDROGRÁFICA DE PASTAZA INFORME PRELIMINAR DE
- {0ELIGIBILITY FORM FOR TANF FUNDED SERVICES}0{FORMULARIO DE ELEGIBILIDAD PARA
- GEOFF BARTON NEW YEAR STARTERS I CAN’T IMAGINE ANY
- REGLAMENTO DEL IMPUESTO SOBRE EL VALOR AÑADIDO (DECRETO FORAL
TC ADANA ALPARSLAN TÜRKEŞ BİLİM VE TEKNOLOJİ ÜNİVERSİTESİ FEN
 READ THE LABEL ! WWWAISEEUCLPLEAFLETS COMMUNICATING THE CLP
READ THE LABEL ! WWWAISEEUCLPLEAFLETS COMMUNICATING THE CLP 00 45 13 8 BIDDER PREQUALIFICATION APPLICATION PAGE
00 45 13 8 BIDDER PREQUALIFICATION APPLICATION PAGEUNIVERSITY OF CALIFORNIA SAN DIEGO SKAGGS SCHOOL OF PHARMACY
ECETRANSWP15AC1HAR20135 ECETRANSWP15AC1HAR20135 25 APRIL 2013 ORIGINAL ENGLISH ECONOMIC COMMISSION
 CIFRAS SIGNIFICATIVAS CRITERIOS LOS CEROS A LA IZQUIERDA
CIFRAS SIGNIFICATIVAS CRITERIOS LOS CEROS A LA IZQUIERDAKLASA 36001070117 URBROJ 213701070220724 NA TEMELJU ČLANKA 12 STAVAK
 URECTANGLE 2 NIVERSITY OF IOWA ANIMAL IMPORT FORM B
URECTANGLE 2 NIVERSITY OF IOWA ANIMAL IMPORT FORM BTHE ASSESSMENT OF CHINA’S TAIWAN POLICY OF THE
FICPI TÜRKİYE 2019 YILININ ILK YUVARLAK MASA TOPLANTISINI
LECTURA 2 “LAS MIL ESTUDIANTES DE LA UNIVERSIDAD DE
PROTOCOLO DE ESTUDIO DE HIPERALDOSTERONISMO PRIMARIO CRITERIOS DE
 SISTEMAS TRIFASICOS EJERCICIO 501 EN EL SIGUIENTE CIRCUITO CALCULAR
SISTEMAS TRIFASICOS EJERCICIO 501 EN EL SIGUIENTE CIRCUITO CALCULAR DORĘCZENIE KOMORNICZE W PRAKTYCE SĄDOWEJ PO ZMIANACH PROCEDURY CYWILNEJ…
DORĘCZENIE KOMORNICZE W PRAKTYCE SĄDOWEJ PO ZMIANACH PROCEDURY CYWILNEJ…TRANSPORTE EDUCACIÓN Y PODER FEMENINO GOOD HEALTH AT LOW
INSTITUTE OF WATER NORTHERN IRELAND AREA MINUTES OF THE
FOR IMMEDIATE RELEASE CADILLAC SRX NEW FOR 2013
AMENDMENT TO THE CONSTRUCTION CONTRACT FOR PAYMENT FOR MATERIALS
 THE CHINESE UNIVERSITY OF HONG KONG (SHENZHEN) SCHOOL
THE CHINESE UNIVERSITY OF HONG KONG (SHENZHEN) SCHOOL KRISCHIK 6 AUGUST 7 2014 UM TURF FIELD DAY
KRISCHIK 6 AUGUST 7 2014 UM TURF FIELD DAY
